This is what was suggested to me on the Arduino forum - can anyone here interpret for me

Looks like PWM would be simpler?
A couple of possible ways to control it are linearly and with PWM.
In the linear model, you have an adjustable constant-current source like this (very crude):
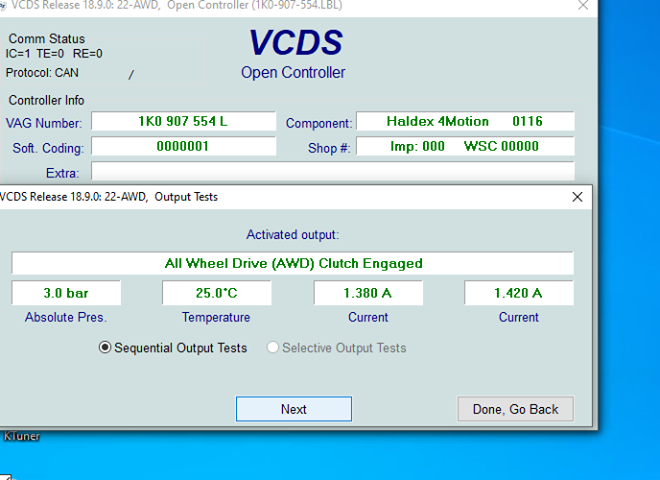
Suppose Rsense = 0.1-ohm. If you wanted 1.38A of current through the Haldex, you'd set up the Arduino to adjust the DAC to put 138mV on the '+' input of the opamp. The opamp will do what it can to get the difference between the '+' and '-' input to zero. Since the '+' terminal is higher than the '-' terminal, the output voltage will rise. This will turn on the transistor and current will start to flow. With current flowing in the Haldex solenoid (and thus Rsense), a voltage drop develops across Rsense. The top-side is connected to the '-' input of the opamp.
As the current reaches 1.38A the voltage seen at the opamp '-' pin approaches 138mV. At this point, the '+' and '-' pins are equal and the transistor will begin to shut off. But then the current will drop so the transistor will turn on again and so on. In this way, the system can give a pretty decent approximation of a constant current source. Its performance -- transient response, over/undershoot etc -- will depend on tuning things like Rfb and Cfb but it can be done.
Because the transistor is acting as a variable resistor here it is subject to power dissipation. A "ballast" resistor to drop the voltage passively will take away some of the heat from the pass transistor but things will still need some heatsinking to a metal enclosure.
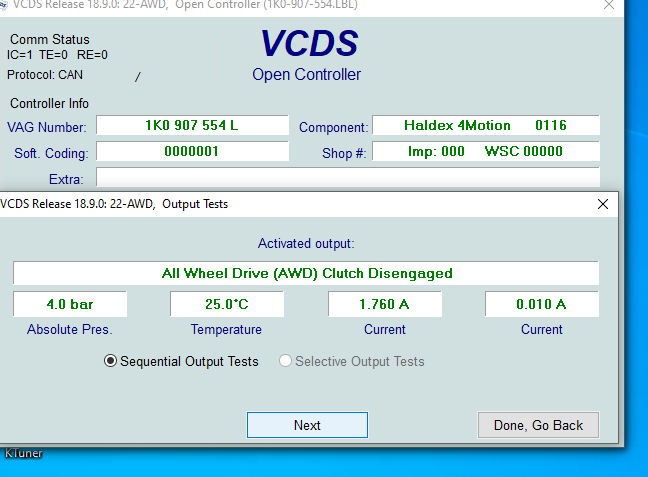
The other way is to simply switch a low-side FET into saturation and off rapidly so that the average coil current in the Haldex solenoid approaches the desired current. The Pd in the FET is much lower since it's in saturation and the Rds on is very small. Assuming the switching frequency is fairly low switching losses will be pretty low too. You just need to characterize the solenoid's response to PWM, which may change over temperature (e.g.) To know the required frequency you'll probably just need to experiment; the inductance of the coil will matter here (--> time constant) but I think you'd be safe to start at, say, 30Hz and work up to 1kHz in search of the sweet spot.
Found this regarding the MOSFET - still greek to me - modes, channel type, etc
First, you need to define what type of Mosfet you are using. Is it depletion mode or enhanced mode? Is the mosfet channel P-type or N-type? I will assume you are asking about N-type, enhanced mode mosfets; although, in your previous question about battery charging you used an P-type, enhanced mode device.
"Low-side" means the current travels from the load or device through the mosfet to ground (common). "High-side" means the current travels from the supply through the mosfet to the load and then to ground.
Another way to put that is:
Low-side = mosfet source to ground, drain to load, load to supply.